

NESTOR





quelques vues de la réalisation
|
RVN (article similaire): L'idée générale était de concevoir un système télépiloté à distance, à partir d'une image reçue sur un écran, sans avoir la vision directe sur le système télépiloté. Cette idée a été testée en utilisant un fauteuil électrique, le projet a été appelé RVN (comme Robot Visio Nomade).
Ce deuxième projet inclut une nouvelle base mobile appelée NESTOR.
Le premier RVN a été développé sur une base de fauteuil électrique pour simplifier la partie motorisation et pour gagner du temps sur la réalisation du projet, la base motrice étant immédiatement opérationnelle.
Les alimentations de la partie vidéo embarquée et des différents sous-ensembles nécessaires au système ont été prélevées sur la source 24 volts du fauteuil, ceci nécessitant un peu d’électronique de régulation pour générer les différentes tensions utiles.
Que peut on conclure de la première expérience ? -Le système de pilotage par commande menton a montré son efficacité, celui-ci reste encore perfectible.
-le pilotage du RVN à partir de l’image reçue est possible.
-La retransmission de l’image est acceptable dans un environnement domestique.
-L’encombrement du fauteuil ne facilite pas son utilisation dans un environnement restreint.
-enfin, cette première expérience a fait énormément plaisir à Denis et c’est sûrement l’aspect le plus positif…
Je rappelle pour ceux qui n'auraient pas lu l'article sur le RVN que Denis est tétraplégique depuis une vingtaine d'années.
|
|
NESTOR Conforté par la première expérience, la nouvelle version du RVN est équipée d’une nouvelle base motrice moins volumineuse (pourquoi NESTOR ? tout simplement pour rappeler le Valet de Tintin).
Cette base supporte une caméra embraquée qui permet l’acquisition d’images lors de son déplacement, les images captées sont retransmises sur l’écran de contrôle du Pilote.
Le pilotage s’effectue à l’aide d’une radiocommande et d’une commande menton adaptée, cette dernière est un peu modifiée pour répondre aux différentes fonctionnalités.
|
 |
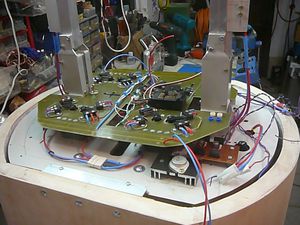
NESTOR : Voilà la bête en phase d’essais en version simplifiée.
En effet nous avions envisagé à terme l’équipement d’une pince dans le prolongement de la caméra pour saisir quelques objets, mais ceci demande encore réflexion et astuces…
Le câblage intègre un système anticollision non activé lors de ces premiers essais.
|
|
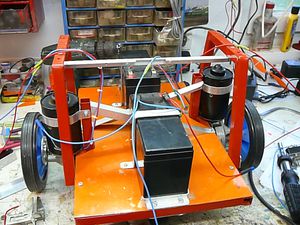
Réalisation de la base mobile : Le châssis est réalisé à partir d’une base mécano soudée en profilé acier de 16x16mm,celui-ci supporte les batteries et les 2 moteurs d’essuie glace, ces derniers servant aux déplacements de la base mobile.
Ces moteurs sont munis de deux roues caoutchoutées (genre tondeuse) achetées en magasin de jardinage.
2 roues folles situées en avant / arrière permettent la rotation et la stabilité de la base mobile. Le poids de l’ensemble constitué (moteurs et batteries) permet d’abaisser au maximum le centre de gravité, gage d’une bonne stabilité finale.
Le dessus est constitué d’une plaque en bakélite permettant d’équiper les bras verticaux et d’isoler le châssis de l’électronique de commande.
|
 |
 |
|
Le principe du mouvement est basé sur l’alimentation différentielle de 2 moteurs d’essuie-glace.
La radiocommande active soit les deux moteurs en inverse ce qui entraîne la rotation de la base sur place, soit les 2 moteurs sont commandés en direct pour avancer ou reculer ou pour virer.
Le mixage de l’alimentation des moteurs permet au Pilote de doser les changements de direction à son gré.
Le freinage des roues est réalisé par la démultiplication non réversible des moteurs (vis sans fin/pignon).
Le diamètre de la base mobile est de 50 cm
|
 |
 |
|
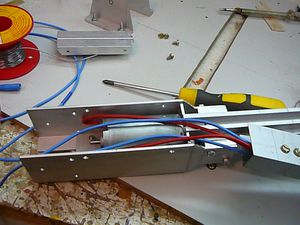
Ces bras constituent le support de la caméra et permettent l’orientation de celle-ci.
Ceux-ci sont conçus en profilés alu mécano vissé et comportent 4 parties :
-un support moteur permettant également la fixation du bras sur la base mobile.
-un fourreau de guidage fixe dans lequel coulisse une partie télescopique.
-un système de vis sans fin permettant d’actionner la partie mobile du bras selon besoin.
-un système de fin de course permettant de gérer la longueur extension maximum ainsi que l’arrêt du moteur.
Les deux bras fonctionnent comme les roues, soit en différentiel pour gérer l’inclinaison souhaitée, soit dans le même sens pour monter ou descendre la caméra.
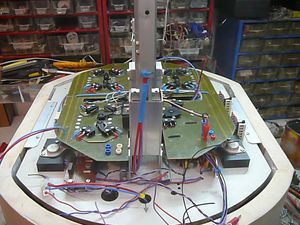
Fixation des bras sur la base mobile: Les bras avant et arrière sont fixés perpendiculairement à la plaque de base, le bras arrière est fixe, le bras avant est mobile en rotation, de façon à suivre la cinématique de l’ensemble, lors des mouvements de positionnement de la caméra.
|
 |
 |
|
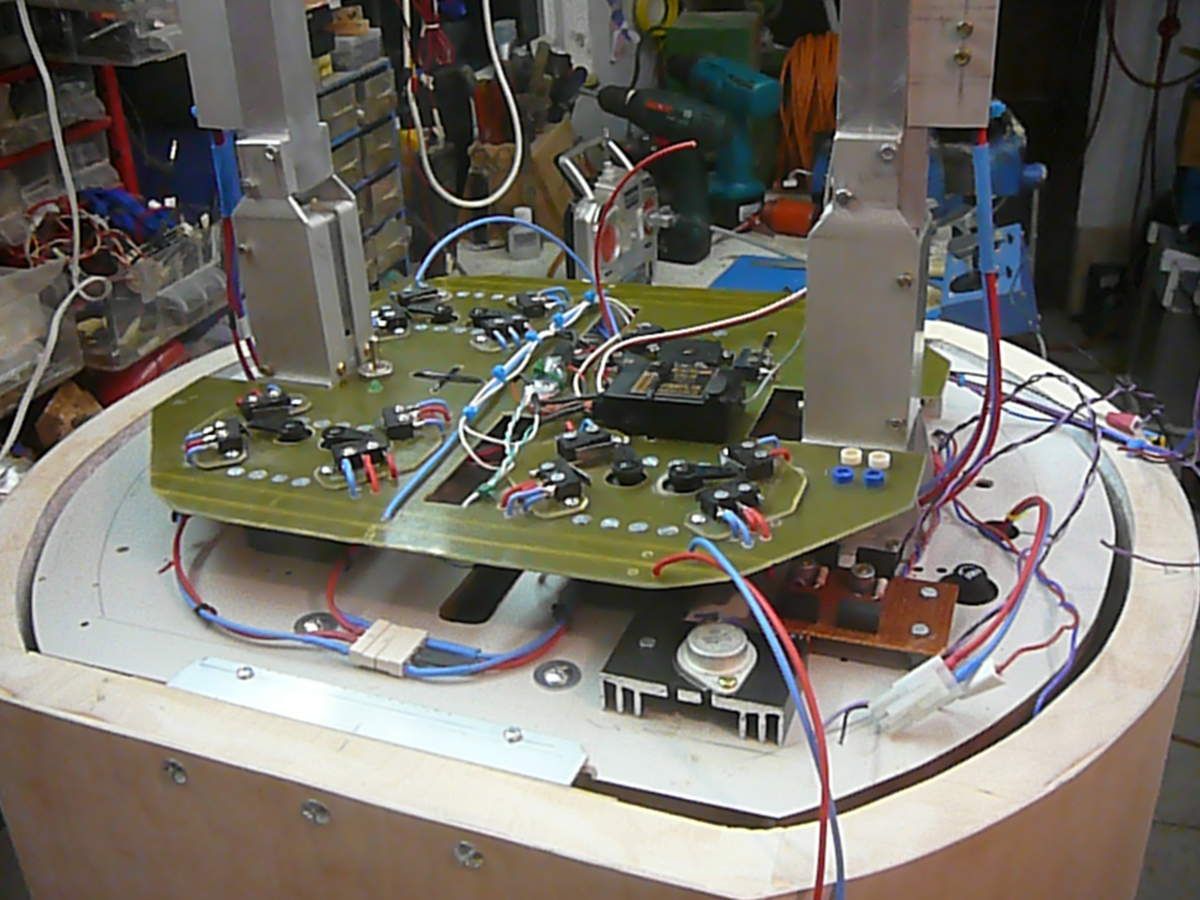
Réalisation du système de commande: Le système de commande est constitué de 3 parties :
-une partie électronique pour la radiocommande des servomoteurs, la retransmission de l’image vidéo, la production et la régulation des tensions nécessaires aux différents sous ensembles (4.8V, 6V, 12V), ainsi que les protections des différents circuits.
-une partie électromécanique pour l’activation des différentes fonctionnalités.
-une source d’énergie constituée d’une batterie 12V 14AH permettant l’alimentation de l’ensemble.
A l'exception des batteries, tous ces constituants sont équipés sur une carte de commande fixée sur la base mobile.
|
 |
 |
 |
 |
|
Réalisation des capotages: Les différents capotages sont réalisés à partir d’un support en polystyrène découpé au fil chaud, plaqué en ctp aviation de 1,5mm, l’ensemble est très résistant et léger.
Les capotages sont en trois parties, la partie inférieure qui intègre les roues et l’ensemble du châssis, la partie supérieure en 2 parties qui englobe toute l’électronique de commande.
|
 |
 |
|
Capotages supérieurs en cours de réalisation, capotage inférieur prêt pour la peinture.
|
|
|
Capots montés sur la base mobile avant peinture
|

|
La commande menton permet l’accès à plusieurs fonctions : La commande menton a été légèrement modifiée par rapport au projet initial pour obtenir d’autres fonctionnalités possibles avec les 4 voies d’origines de la radiocommande.
Quelles sont les fonctions ? Le principe est le suivant : le manche de droite permet d’activer la fonction choisie par le manche cranté de gauche, c’est une manière de faire 8 voies avec 4 tout en étant facilement accessibles avec le menton, ne l’oublions pas.
1-le pilotage du robot (avant/arrière – gauche/droite).
2-l’activation des bras verticaux (les deux en même temps ou l’un vis-à-vis de l’autre en différentiel).
Extension possible à terme sur d’autres fonctions 3 et 4.
Comme pour le RVN, cette commande menton est fixée sur le lit, elle est ajustée selon ergonomie du Pilote.
Ce boîtier est relié à l’émetteur de radiocommande.
|
 |
 |
|
Caméra et transmetteur vidéo équipé sur la potence en haut des 2 bras. |

NESTOR prêt à obéir aux ordres de Denis |
Que dire de plus ?
Voilà le projet bien avancé après environ 1000h de cogitations, de conception, de réalisation, de modification pour arriver à faire fonctionner la bête, tout ce travail dans le but d’apporter une réponse à Denis, tétraplégique depuis plus de 20 ans.
Dans notre projet nous avons investi moins de 1000 euros pour les deux versions (RVN et NESTOR) en 2 ans de travail.
Cette réalisation n’a aucune prétention si ce n’est que de se faire plaisir et d’aboutir à concevoir un objet qui fonctionne et qui réponde à un besoin.
Avec un investissement plus important il serait possible d’améliorer encore le système d’un point de vue facilité d’emploi pour la personne alitée et pour son entourage familial, d’y ajouter des sécurités complémentaires, de le piloter par commandes vocales de diminuer encore le volume déplacé pour faciliter la navigation dans un environnement domestique.
Il y a une multitude d’améliorations à faire pour ces personnes handicapées.
Personnellement j’ai été surpris par la facilité avec laquelle Denis balade cet engin dans sa maison, avec son menton et sans voir l’environnement, avec seulement l’image reçue sur son écran.
Il est vrai que les Japonais font mieux, loin de moi cette prétention, oui mais à quel prix, personne dans le cas de Denis ne peut se payer leurs robots, et pourtant combien ceux-ci leur seraient utiles.